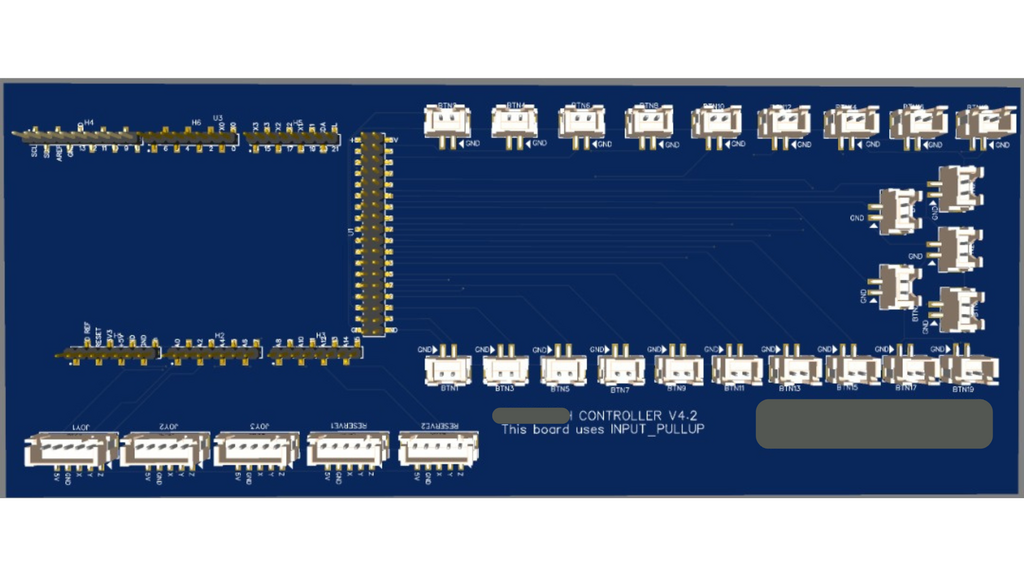
We designed and developed a custom PCB shield for Arduino Mega 2560 R3 to serve as the main controller interface for a robot simulator. The process began with careful planning of control signals and joystick/button mappings to support precise robotic operations. Using EasyEDA, we created an autoroute-friendly layout with a clean SIG + GND wiring scheme and maintained the Arduino Mega shield footprint for seamless hardware integration. Once the design was finalized, we generated the Gerber files, fabricated the board, and completed the PCB printing and assembly. The result is a purpose-built, reliable controller board that simplifies wiring, ensures stable signal performance, and provides a strong foundation for interactive robotic simulations.
We were commissioned by a client to build a high-fidelity industrial simulator that seamlessly connects real-world hardware with an interactive virtual environment. The result was a powerful and immersive training system with dynamic physical feedback.

We created a Unity integration tool that connects microcontrollers, such as the Arduino Mega 2560 R3, directly to Unity’s Input System without the need for custom drivers. It automatically generates InputDevice layouts and Arduino sketches, supports Modbus TCP, and simplifies serial handling by utilizing clean, structured device profiles. This enhances hardware integration, making it faster, more reliable, and more developer-friendly.


